

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知离散因果系统的动态方程为 (1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的
已知离散因果系统的动态方程为
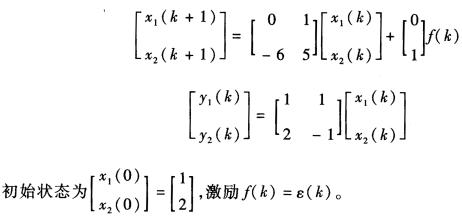 (1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的单位序列响应h(k)。
(1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的单位序列响应h(k)。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知离散因果系统的动态方程为
(1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的单位序列响应h(k)。
答案
 更多“已知离散因果系统的动态方程为 (1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的”相关的问题
更多“已知离散因果系统的动态方程为 (1)求状态方程的解和系统的输出; (2)求系统函数H(z)和系统的”相关的问题
第2题
已知由差分方程y(k)+ay(k一1)+by(k一2)=f(k)+cf(k一1)+df(k一2),其中a、b、c、d均为实常数,描述的离散时间LTI因果系统的系统函数H(z)具有如下特征:H(z)在原点z=0有二
 (1)该系统的系统函数H(z),并确定常数a、b、c、d; (2)绘出该系统的零极点图,并说明该系统是否稳定; (3)当输入为f(k)=δ(k)+δ(k一2)时,求系统的输出y(k); (4)如果系统的输入为f(k)=(一1)k,求该系统的输出y(k); (5)绘出该系统的直接形式的流图。
(1)该系统的系统函数H(z),并确定常数a、b、c、d; (2)绘出该系统的零极点图,并说明该系统是否稳定; (3)当输入为f(k)=δ(k)+δ(k一2)时,求系统的输出y(k); (4)如果系统的输入为f(k)=(一1)k,求该系统的输出y(k); (5)绘出该系统的直接形式的流图。
第3题
已知某离散时间系统的差分方程为
y(n)=(β+1)y(n-1)=x(n-1)
试问β为何值时,该系统稳定?
第4题
已知某离散时间系统的状态方程和输出方程

初始状态
第5题
考虑随机相位调制信号的估计问题。假设离散的状态方程和观测方程分别为
sk=0.85sk-1+ωk-1
和
xk=Acos(ω0k+0.5sk)+nk,k=1,2,…
其中,余弦信号的振幅a和频率ω0为已知常数;ωk-1(k≥1)和nk(k≥1)都是均值为零、
方差为1的白噪声随机序列,且二者互不相关。求信号的状态估计量 。可见这是一个
。可见这是一个
对随机相位调制信号的估计问题,请用推广的离散卡尔曼滤波实现这种估计。
第6题
某LTI离散时间系统的全响应为y(k)=[1-(-1)k-(-2)k]u(k),初始条件为y(-1)=0,y(-2)=0.5,当f(k)=u(k)时,求描述该系统的差分方程。
求系统函数H(z),确定a值,并写出系统的差分方程。
第7题
某LTI离散时间系统的全响应为y(k)=[1-(-1)k-(-2)k]u(k),初始条件为y(-1)=0,y(2)=0.5,当f(k)=u(k)时,求描述该系统的差分方程。
第8题
已知系统的状态方程和输出方程为
,
系统的输入f(t)=ε(t),初始状态x1(0-)=1,x2(0-)=2。求
第10题
已知离散时间系统的状态空间方程式为
y(n)=[2 1]x(n)+[1]f(n)
若系统的初始状态x(0)=[0 1]T,输入f(n)=ε(n),求该系统的输出y(n)。




















