



 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知由差分方程y(k)+ay(k一1)+by(k一2)=f(k)+cf(k一1)+df(k一2),其中a、b、c、d均为实常数,描述的离
已知由差分方程y(k)+ay(k一1)+by(k一2)=f(k)+cf(k一1)+df(k一2),其中a、b、c、d均为实常数,描述的离散时间LTI因果系统的系统函数H(z)具有如下特征:H(z)在原点z=0有二
 (1)该系统的系统函数H(z),并确定常数a、b、c、d; (2)绘出该系统的零极点图,并说明该系统是否稳定; (3)当输入为f(k)=δ(k)+δ(k一2)时,求系统的输出y(k); (4)如果系统的输入为f(k)=(一1)k,求该系统的输出y(k); (5)绘出该系统的直接形式的流图。
(1)该系统的系统函数H(z),并确定常数a、b、c、d; (2)绘出该系统的零极点图,并说明该系统是否稳定; (3)当输入为f(k)=δ(k)+δ(k一2)时,求系统的输出y(k); (4)如果系统的输入为f(k)=(一1)k,求该系统的输出y(k); (5)绘出该系统的直接形式的流图。
 答案
答案
查看答案

 (取前9点值)。
(取前9点值)。
 (1)确定常数a、b; (2)根据所列的状态方程求x1(k)和x2(k)的闭式解; (3)求该系统的差分方程。
(1)确定常数a、b; (2)根据所列的状态方程求x1(k)和x2(k)的闭式解; (3)求该系统的差分方程。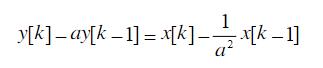 采用直接型结构,b位字长(不含符号位)定点运算,舍入处理。假设x[k]是白噪声,幅度在[-1,1]之间均匀分布,系数
采用直接型结构,b位字长(不含符号位)定点运算,舍入处理。假设x[k]是白噪声,幅度在[-1,1]之间均匀分布,系数 ,试求在保证不发生溢出的条件下,滤波器的输出信噪比。
,试求在保证不发生溢出的条件下,滤波器的输出信噪比。


















