

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
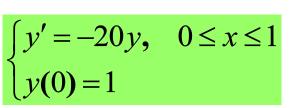
分别在h=0.1,h=0.2用经典R-K方法求解微分方程
分别在h=0.1,h=0.2用经典R-K方法求解微分方程
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
分别在h=0.1,h=0.2用经典R-K方法求解微分方程
答案
 更多“分别在h=0.1,h=0.2用经典R-K方法求解微分方程”相关的问题
更多“分别在h=0.1,h=0.2用经典R-K方法求解微分方程”相关的问题
第2题
用经典R-K方法解下述微分方程组
 (解析解:χ=-2e-t,y=e-t)。
(解析解:χ=-2e-t,y=e-t)。
第3题
如果二元函数f(x,y)在点(a,b)处取得极值,那么一元函数g(x)=f(x,b)及h(y)=f(a,y)分别在点x=a,y=b必定取得极值.反之,结论一定成立吗?
第4题
如果二元函数f(x,y)在点(a,b)处取得极值,那么一元函数g(x)=f(x,b)及h(y)=f(a,y)分别在点x=a,y=b必定取得极值.反之,结论一定成立吗?
第5题
用布拉克曼窗设计一个线性相位的理想带通滤波器
求出h(n)序列,并画出20lg|H(ejω)|曲线,设ωc=0.2π,ω0=0.4π,N=51。
第6题
在一个VR=960cm3的CSTR中进行反应A→3R的动力学测定,催化剂W=1g,dp=3mm,p=0.8MPa(8atm),t=700℃,纯A以不同速率进料,测定数据如下,试求该催化剂上的反应速率。
加料速率,L/h | 100 | 22 | 4 | 1 | 0.6 |
pA出/pA进 | 0.8 | 0.5 | 0.2 | 0.1 | 0.05 |
第7题
用微滤膜处理某悬浮液,0.1MPa下,滤膜的清水通量为150L/(m2·h),已知悬浮颗粒为0.1μm的球形微粒,当滤饼层的厚度为6μm,空隙率为0.2时,滤膜的通量为40L/(m2·h),求此时的过滤压差。
第8题
加速度干扰的定义:

式中:σ——加速度干扰;
T——观测时间;
a(ti)——i时刻加速度;
假设车辆在一条圆弧段上匀速行驶,忽略驾驶员和交通状况对行车安全舒适性的影响,只考虑道路条件的影响,以下是基于圆弧路段的加速度干扰模型:
式中:v——车辆平均速度;
r——所在圆弧路段的半径;其中,圆弧曲线上车辆行驶路段的圆心角
试画出车辆分别在v=30km/h,v=60km/h,v=90km/h的行驶速度下的安全舒适域。
第9题
现有一个双分离望远物镜的初始数据如下:
h=30mm,tanω=-0.0349,Lz=0.1mm,l=∞
r/mm d/mm nDnFnC
1 1 1
295.008
5 1.6199 1.6321 1.61504
130.302
0.1 1 1 1
130.302
5 1.5163 1.52196 1.5139
-735.210
1 1 1
用阻尼最小二乘法自动平衡程序进行自动平衡像差。
第10题
一个线性时不变系统用常系数差分方程来表征,
简述可以用N点DFT绘出频率响应H(ejω)的N个采样值的方法。
第11题
照相物镜的结构参数如下:
h=10.526mm,tanω=-0.5400,l=∞ f'=39.6mm
r/mm d/mm nDnFnC
1 1 1
25.93
4 1.6709 1.68897 1.66679
91.28
0.2 1 1 1
15.76
6 1.6395 1.65635 1.6356
178.67
1.72 1.6725 1.69983 1.6666
10.33
4 1 1 1
∞(孔径光阑)
4 1 1 1
-10.94
1.254 1.6725 1.69983 1.6666
r/mm d/mm nDnFnC
-170.80
3.63 1.71687 1.73578 1.7124
-15
0.01 1 1 1
346.17
4 1.71687 1.73578 1.7124
-27.84
用阻尼最小二乘法自动平衡程序进行自动平衡像差。



















