

 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
系统闭环根轨迹可以按解析法求出。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“系统闭环根轨迹可以按解析法求出。()”相关的问题
更多“系统闭环根轨迹可以按解析法求出。()”相关的问题
第2题
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图所示。取
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
第3题
设单位反馈系统开环传递函数:
 试用根轨迹法设计串联校正装置,使系统Kv≈5(rad/s),且原系统闭环极点位置无明显变化。
试用根轨迹法设计串联校正装置,使系统Kv≈5(rad/s),且原系统闭环极点位置无明显变化。
第4题
A.根轨迹是一种图解方法
B.根轨迹避免了求解高阶系统特征方程的困难
C.根轨迹可以直观看出系统中某些参数的变化对控制系统闭环特征根分布影响的趋势
D.根轨迹在工程上得到了广泛的应用
第7题
根轨迹的分离点是系统闭环特征方程的重根。试证明分离点d满足下述方程
其中pi(i=1,2,…,n),zi(i=1,2,…,m)分别是系统开环传递函数的极点和零点。
第8题
单位反馈系统如图所示,其中 ,a>0,b>0为待定参数。已知K为某一正数时,闭环系统的极点为-1,-1,-1。
,a>0,b>0为待定参数。已知K为某一正数时,闭环系统的极点为-1,-1,-1。
(1)确定参数a和6并由此确定G(s)的另外两个极点。
(2)确定根轨迹的分离点和汇合点、根轨迹的渐近线、出射角以及根轨迹与虚轴的交点并画出根轨迹图。
(3)确定使闭环系统稳定的K值范围。

第9题
(2009年)如图4.7—4所示为某闭环系统的动态结构图,其中K>0,它的根轨迹为()。
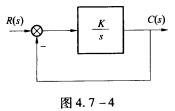
A.整个负实轴
B.整个虚轴
C.虚轴左面平行于虚轴的直线
D.虚轴左面的一个圆
第11题
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)设负反馈系统中,前向通道的传递函数为:
 反馈通道的传递函数为H(s)=1。 (1)绘制系统的根轨迹图,并判断闭环系统的稳定性。 (2)改变反馈通道的传递函数:使H(s)=2s+1,绘制系统的根轨迹图,判断闭环系统的稳定性。简述H(s)的这一变化对系统稳定性的影响。
反馈通道的传递函数为H(s)=1。 (1)绘制系统的根轨迹图,并判断闭环系统的稳定性。 (2)改变反馈通道的传递函数:使H(s)=2s+1,绘制系统的根轨迹图,判断闭环系统的稳定性。简述H(s)的这一变化对系统稳定性的影响。




















