题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
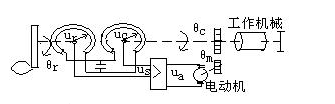
某位置随动系统结构图如图所示。已知K2=13600,K3=27.6密位/(V·s)。负载扰动引起的电压降为IdLR=10V。设计指标
某位置随动系统结构图如图所示。已知K2=13600,K3=27.6密位/(V·s)。负载扰动引起的电压降为IdLR=10V。设计指标为:位置输入稳态误差esp≤1密位,当输入轴最高转速为

 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
某位置随动系统结构图如图所示。已知K2=13600,K3=27.6密位/(V·s)。负载扰动引起的电压降为IdLR=10V。设计指标为:位置输入稳态误差esp≤1密位,当输入轴最高转速为
答案
 更多“某位置随动系统结构图如图所示。已知K2=13600,K3=27.6密位/(V·s)。负载扰动引起的电压降为IdLR=10V。设计指标”相关的问题
更多“某位置随动系统结构图如图所示。已知K2=13600,K3=27.6密位/(V·s)。负载扰动引起的电压降为IdLR=10V。设计指标”相关的问题
第1题
某随动系统,忽略小时间常数,采用并联校正,其简化的结构图如图5所示,其中

1)求出Wc(s)传递函数的形式与参数。
2)求出满足该指标的Kobj值。
3)画出用并联校正时的系统对数幅频特性。
第4题
某随动系统的结构和参数如图所示,采用频率法分析系统的性能,求出系统 的频域指术ωc、γ和时域指标σ%、t
s。
第5题
系统动态结构图如图所示。已知K0=3.2,T1=0.33,T2=0.036。要求校正后的系统在阶跃信号输入之下无静差,同时γ'≥60°,

第6题
调速系统动态结构图如图所示。已知K0=55.58,T1=0.049,T2=0.026,Ts=0.00167。要求采用PI控制器进行校正,使系统实现阶跃信号输入之下无静差,并具有足够的稳定裕量。

第7题
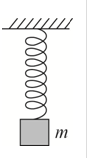
t的方式做上、下振动(以向下为正).已知空气阻力系数为γ,设置以O为原点、竖直向下的x轴,试求系统达到稳定运动状态后,小物块的位置x随时间t的变化关系。
第8题
设某反应为

已知k1=0.44×10-2/min,k2=2.96/min,k3=0.21×10-2/min,初始浓度[A]0=0.01mol·L-1,[B]0=[C]0=0mol·L-1,EPS=10-6,间隔为0.5min,求10min内,A,B,C的浓度随时间的变化。