
重要提示:请勿将账号共享给其他人使用,违者账号将被封禁!
查看《购买须知》>>>

 东北大学《直流自动控制系统》21春在线平时作业2答案试题导航
东北大学《直流自动控制系统》21春在线平时作业2答案试题导航
A.(1)(2)(3)
B.(1)(2)(4)
C.(2)(3)(4)
D.(1)(2)(3)(4)
A.只用比例放大器的反馈控制系统,其被调量仍是有静差的。
B.反馈控制系统可以抑制不被反馈环节包围的前向通道上的扰动。
C.反馈控制系统的作用是:抵抗扰动、服从给定。
D.系统的精度依赖于给定和反馈检测的精度。




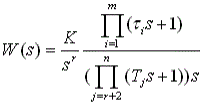 ,n表示系统的阶数,若r=1,则该传递函数所对应的系统为()型系统。
,n表示系统的阶数,若r=1,则该传递函数所对应的系统为()型系统。

















