题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
已知比例一微分控制系统如图4-59所示。
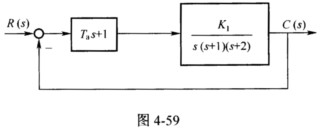 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知比例一微分控制系统如图4-59所示。
试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
答案
 更多“已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。”相关的问题
更多“已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。”相关的问题
第1题
已知具有理想继电器的非线性系统如图8-16所示,试用相平面法分析:
(1)Td=0时系统的运动;
(2)Td=0.5时系统的运动,并说明比例微分控制对改善系统性能的作用;
(3)Td=2时系统的运动。

第8题
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)控制系统方块图如图3-43所示。
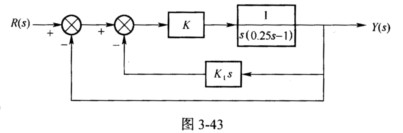 (1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
(1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
第9题
具有饱和非线特性的非线性控制系统如图8-17所示,若r(t)=0,试在e一
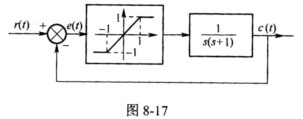 平面上绘制e(0)=2,
平面上绘制e(0)=2,
 (0)=0时的相轨迹图(要求将解题过程写清楚)。
(0)=0时的相轨迹图(要求将解题过程写清楚)。

第10题
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
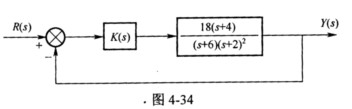 。
。
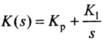 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
第11题
已知一离散系统Hd(z)的频率响应Hd(ejΩ),如图A-22所示,系统H(z)定义为H(z)=Hd(-z)。


 。
。
 ,校正后希望的对数幅频特性画于图6-27中,试
,校正后希望的对数幅频特性画于图6-27中,试